Предыдущая глава Следующая глава Оглавление
Глава 12.
Порядок работы комплекса С-25.
Десять радиолокационных станций А-100Д (РУД – разведывательные узлы дальние) были расположены вокруг Москвы по кольцу с радиусом примерно 400 км. Обладая дальностью действия до 200 км, они обеспечивали оповещение о самолётах противника за 520 км до полков внешнего и за 550 км внутреннего кольца. Бомбардировщики типа В-29 или В-36 могли преодолеть это расстояние примерно за час. Но реактивные бомбардировщики типа В-47 или В-52 имели скорость порядка 900 км/час, и расстояние от момента обнаружения станциями А-100Д до входа в зону поражения полков внешнего кольца могли преодолеть за 30 минут. Это обстоятельство накладывало ограничение на время приведения полков С-25 в боевую готовность. Поэтому были установлены жёсткие временные нормативы по приведению полков в готовность к открытию огня.
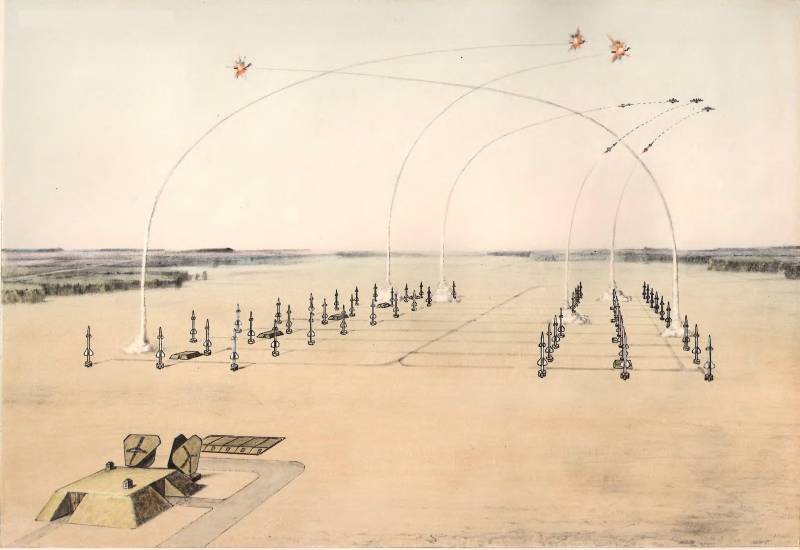
Каждый полк состоял из трёх объектов – огневая (стартовая) позиция, радиотехнический центр (РТЦ) наведения и военный городок. Взаимное расположение огневой позиции и РТЦ обусловлено принципом функционирования комплекса С-25. Так как полки С-25 расположены по окружности вокруг защищаемого объекта – Москвы, то сектора обзора каждого полка направлена в сторону, примерно противоположную направлению на Москву. Стартовые позиции располагались в 1,5-4 км от РТЦ по направлению сектора обзора, то есть в направлении от Москвы. Стартовые позиции предназначались для подготовки к старту и старта ракет. Станция Б-200, находившаяся в радиотехническом центре, обнаруживала цели в своём секторе обзора и наводила на них ракеты.
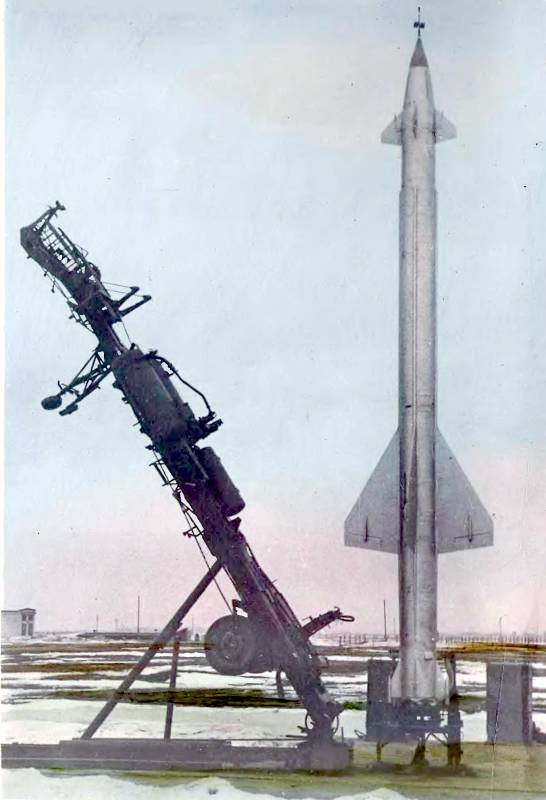
Ракеты семейства В-300, входящие в состав комплекса С-25, стартовали вертикально вверх. Для успешного старта снаряженной ракеты надо было установить её вертикально на пусковой стол и закрепить там; провести подготовку к старту – раскрутить гироскопы автопилота, прогреть и вывести на режим электронную аппаратуру ракеты, выполненную на электронных лампах; выполнить старт ракеты – реализовать определённую последовательность действий (циклограмму старта), в результате чего электропитание бортовой аппаратуры перейдёт на бортовой источник, заработает система подачи компонентов топлива, двигатель запустится и выйдет на номинальный режим, система крепления ракеты автоматически освободит её и ракета поднимется в воздух. Для этого предназначались стартовые (огневые) позиции комплекса С-25.
Проверенные и снаряжённые ракеты на автополуприцепах тягачами должны были доставляться с технических баз на стартовые позиции полков. Общий вес автополуприцепа с установленной на нём снаряженной ракетой составлял 7100 кг. [3]
На стартовой (огневой) позиции находилось 60 стартовых площадок по двум расходящимися направлениям слева и справа от биссектрисы зоны. Слева и справа от центральной дороги отходило по 10 поперечных проездов, перпендикулярных центральной, всего 20 – по числу каналов наведения станции Б-200. На каждом из них располагались по три стартовые площадки. Расстояние между стартовыми площадками в линии по фронту равно 75м. Расстояние между соседними поперечными проездами по глубине составляет 150м. Площадь стартовой позиции равна примерно 800х1500 м. Три стартовые площадки одного поперечного проезда связаны с одним из каналов наведения станции Б-200. [1]
Расстояние между стартовыми площадками определялось соображениями безопасности при старте ракет. Точное расстояние от станции наведения до стартовых позиций не имело принципиального влияния на работу комплекса, существенным было лишь то обстоятельство, чтобы стартующие ракеты не имели слишком большой угловой скорости относительно станции наведения, и аппаратура успевала осуществить захват ракет на автосопровждение.
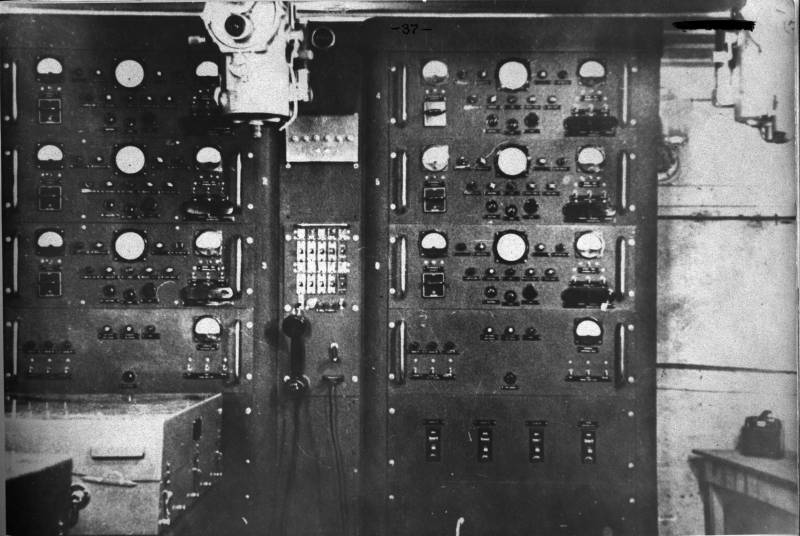
На каждые два поперечных проезда, то есть на 6 стартовых площадок, имелся один бункер управления, в котором размещался пусковой пульт "ЧП" и электросиловое оборудование (распределительное устройство высокого напряжения, понижающий трансформатор и вспомогательное электросиловое оборудование). Пульт "ЧП" служил для проведения подготовки ракеты к пуску, предпусковой проверки и пуска ракеты. [1]
Стартовые площадки предназначались для старта ракет. На каждой стартовой площадке находилось подъёмно-пусковое устройство, состоящее из подъёмника СМ-102А и пускового стола СМ-82, а также силовой шкаф и переходная клеммная коробка кабель-мачты. Подъёмно-пусковое устройство вместе с силовым шкафом и клеммной коробкой с кабель-мачтой устанавливалось на цементно-бетонном фундаменте стартовой площадки. Фундамент стартовой площадки прилегал к боковой части подъездной дороги. Кабели от силового шкафа к переходной клеммной коробке, электродвигателю лебёдки и подъёмному устройству проходили по трубам, забетонированным в фундаменте. На фундаменте имелись фундаментные болты для крепления пускового стола, переходной клеммной коробки, силового шкафа и подъёмного устройства. [2]
Ракета транспортировалась к стартовой площадке на автополуприцепе тягачом по специальным дорогам огневой позиции. На каждой стартовой площадке от поперечного проезда был предусмотрен специальный заезд с бетонными направляющими высотой 15-20 см, по которому тягач подавал задним ходом автополуприцеп с ракетой и устанавливал его над подъёмным устройством. Установку ракеты в вертикальное положение на пусковой стол, а также снятие ракеты с пускового стола в случае необходимости производили подъёмным устройством, работающим совместно с автополуприцепом, на котором перевозится ракета. Подъём и спуск автополуприцепа с ракетой осуществлялись движущимися стрелами подъёмника. Стрелы приводились в движение при помощи тросовой лебёдки, барабан лебёдки вращался электродвигателем мощностью 5 квт через редуктор и автоматический тормоз, который поддерживал постоянную скорость опускания автополуприцепа, а также удерживал его в любом положении при остановках. В случае выхода из строя автоматического тормоза для удержания автополуприцепа предназначался ручной колодочный тормоз. Управление электродвигателем лебёдки осуществлялось со щита силового шкафа. В случае отсутствия электроэнергии для приведения в действие подъёмника предназначался ручной привод. [2]
Электропитание силовых шкафов стартовых площадок осуществлялось трёхфазным напряжением 380/220 В, которое подавалось из бункера управления по подземному кабелю. В распределительное устройство каждого бункера управления заходил силовой кабель под напряжением 6 кв. Установленный в бункере масляный трансформатор обеспечивал питание оборудования стартовых площадок, а также пульта ЧП, установленного в бункере. Пульт ЧП обеспечивал подготовку к старту и старт ракет со всех шести связанных с ним стартовых площадок и состоял из двух стоек и панели- вставки, на которой размещался телефонный коммутатор на 10 номеров и звонок боевой тревоги. Каждая стойка обслуживала три ракеты, имеющих общий канал радиоуправления, и состояла из трех одинаковых блоков управления подготовкой и стартом ракеты (блоки «А») и одного блока общих цепей питания и связи со станцией Б-200 (блок «Б»). [1]
Когда ракета занимала вертикальное положение, её устанавливали и закрепляли на пусковом столе стопорным механизмом, после чего цапфы передней опоры автополуприцепа выводили из гнёзд ракеты и опускали автополуприцеп. Ракету, закреплённую на пусковом столе, при помощи поворотного механизма стола устанавливали по направлению пуска (по директрисе стрельбы). Ориентация ракеты по направлению пуска была необходима для того, чтобы после старта ракета попадала в зону захвата станцией наведения. Координаты этой зоны соответствовали начальным значениям, которые вырабатывали координатные блоки станции. После прохождения зоны захвата ракета автоматически бралась на сопровождение станцией наведения. На сленге это называлось – «попасть в строб». [2]
После установки на пусковой стол к бортовому щитку установленной ракеты подключался кабель с отрывным штекером. В бункере управления на соответствующем блоке «А» пульта ЧП загоралась лампа «ИЗДЕЛИЕ НА СТОЛЕ». Для того, чтобы ракета смогла стартовать, необходимо было провести её подготовку. Для постановки ракеты на подготовку необходимо было нажать на кнопку «ПОДГОТОВКА» на блоке «А» пульта ЧП, при этом лампа «ИЗДЕЛИЕ НА СТОЛЕ» гасла и загоралась мигающим светом лампа «ПОДГОТОВКА». Процесс подготовки продолжался примерно 3 минуты, после чего ракета была готова к старту, лампа «ПОДГОТОВКА» горела непрерывно. [6]
В определённый момент времени могла стартовать только одна ракета с одной из трёх стартовых площадок поперечного проезда, так как один канал наведения станции Б-200 мог наводить только одну ракету. С какой из трёх стартовых площадок канала по сигналу со станции должна была стартовать ракета, задавалось специальным переключателем «ПОСЛЕДОВАТЕЛЬНОСТЬ ПУСКА ИЗДЕЛИЙ», расположенном на пульте ЧП.
Ракета могла находиться в готовности к старту ограниченное время – 15 минут. По истечении этого времени она автоматически снималась с подготовки, чтобы не перегрелась бортовая аппаратура. Снова на подготовку ракету можно было поставить только через 30 минут, за это время бортовая аппаратура ракеты успевала остыть. Наличие трёх стартовых площадок на каждом поперечном проезде, связанных с одним каналом радиоуправления, позволяло постоянно иметь одну готовую к старту ракету на каждый канал управления, ставя на подготовку следующую ракету, пока аппаратура двух предыдущих остывала.
Сигнализация о включении ракет на подготовку и о готовых к старту ракетах по сигнальным кабелям со стартовых позиций автоматически передавалась на станцию наведения, где эта информация отображалась на пульте старшего оператора тем же образом, что и на пульте «ЧП»: мигающая лампа, соответствующая одной из 60 стартовой площадке огневых позиций, означала – ракета находится на подготовке, постоянно горящая лампа означала – ракета готова к старту. Таким образом, примерно через 10 минут после объявления тревоги ракеты на стартовой позиции были установлены на пусковые столы и подготовлены к стрельбе.
Как показали Государственные испытания, проведённые на полигоне в Капустином Яре в конце 1954 года, тренированный расчёт из трёх человек в условиях хорошей видимости (в дневное время) мог установить ракету на пусковой стол за 7-8 минут. В условиях плохой видимости и ночью время установки ракеты увеличивалось до 17-20 минут. Освещение стартовых позиций не было предусмотрено, в тёмное время расчёты пользовались переносными электросветильниками, которые подключались к силовому шкафу.
Применявшийся в документации разработчиков термин «центральный радиолокатор наведения (ЦРН)» на боевых объектах не использовался, применялся термин «станция Б-200», или «станция наведения». Территория размером примерно 500х500 метров, на которой находилась станция Б-200, называлась «радиотехнический центр (РТЦ)».
Станция Б-200 располагалась в полузаглубленном железобетонном сооружении, обвалованном землей и замаскированном дёрном. В процессе строительства помещение станции называли «Объект №1», или «Здание №1». Внутренние размеры помещения станции Б-200 составляли 25 на 40,5 метров, само помещение в плане представляло из себя множество квадратов 4,5 на 4,5 метра, образованных наружными стенами и внутренними колоннами. Высота потолков составляла 4,5 метра. В бетонном полу были сделаны кабельные коллекторы. С одного боку вдоль помещения станции проходил коридор шириной 2,5 метра. Свод станции был способен выдержать прямое попадание 1000-килограммовой авиабомбы. В помещение станции вели три входа: главный, боковой и с антенной площадки.
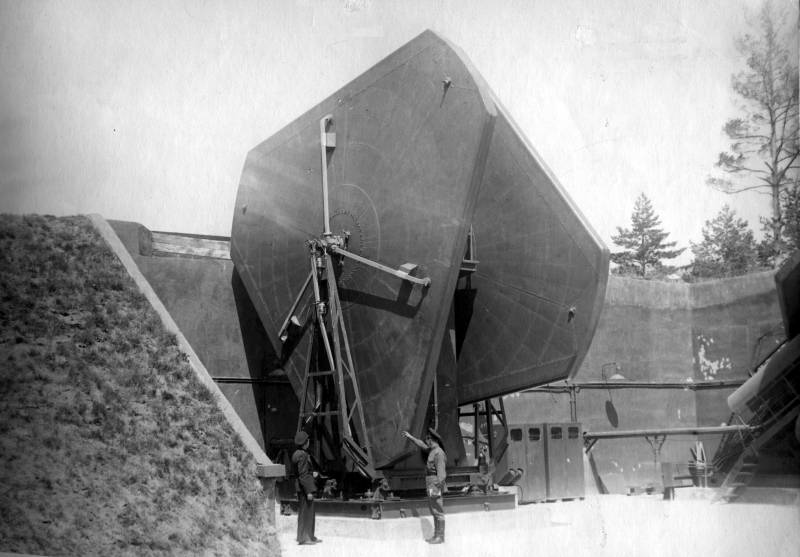
На антенной площадке перед станцией находились две вращающиеся антенны диаметром 9 метров каждая: наклонная – была предназначена для обзора воздушного пространства в азимутальной плоскости; и вертикальная - была предназначена для обзора воздушного пространства в угломестной плоскости. В углублениях бетонной площадки располагались четыре антенны системы передачи команд – для передачи управляющих команд на находящиеся в полёте ракеты. Всё остальное оборудование станции находилось внутри помещения. Наибольший объём помещения занимала аппаратура центрального радиолокатора наведения, она содержала примерно 13 тысяч электронных ламп. Такое количество оборудования при работе выделяло много тепла, поэтому в помещении станции была сделана мощная система вентиляции, а по бокам станции располагались четыре вентиляционные шахты.
Большое количество воздуха требовалось и для работы дизельной электростанции, которая также находилась в помещении станции. В обычном режиме электропитание станции происходило от электрической сети Мосэнерго. Подстанция 35/6 кв находилась в нескольких километрах от РТЦ, от подстанции на РТЦ шло два кабеля 6 кв. Они заходили в распредустройство в помещении станции, электропитание оборудования станции осуществлялось через масляный трансформатор на 560 КВА. Из распредустройства станции выходило два кабеля 6 кв, через них подавалось электричество на стартовые позиции. Ещё один кабель 6 кв из станции шёл на электроподстанцию в жилой городок. При боевой работе всё электропитание осуществлялось от электрогенераторов, работающих от дизелей. Для охлаждения дизелей в помещении станции была ёмкость с водой, топливо для дизелей находилось в подземном резервуаре, который располагался рядом с помещением станции. Выхлопные газы от дизелей выводились через вентиляционные трубы, которые стояли рядом с помещением станции недалеко от главного входа.
Ещё на этапе проектирования зенитного комплекса разработчики задумались над управлением боевой работой. Одному оператору было бы сложно одновременно следить за большим количеством целей и наводимыми на них 20 ракетами. Поэтому было решено разбить все стрельбовые каналы ЦРН на четыре группы, по пять стрельбовых каналов в каждой, и поручить управление боевой работой (обнаружение целей, взятие их на автосопровождение, пуск по целям ракет, наблюдение за всем процессом наведения ракет на цели) отдельным операторам для каждой пятиканальной группы. Для операторов были предусмотрены четыре идентичных (с точностью до зеркальности) рабочих места. На каждом из них было два электронных экрана, на которых отображалась воздушная обстановка в секторе обзора комплекса: на одном экране - в координатах дальность—азимут, на другом - дальность—угол места. [8]
За каждым из рабочих мест — по два оператора. Оператор наведения выбирал цели для их автоматического сопровождения, оператор пуска — производил пуски ракет по вошедшим в зону поражения зенитного комплекса целям. Для координации действий операторов четырех рабочих мест цели, обрабатываемые операторами других рабочих мест, на индикаторах данного рабочего места подсвечивались специальными метками. По ракетам на индикаторы выдавались сигналы ответчиков только ракет своей пятиканальной группы — для исключения перенасыщения изображения при отражении массовых налетов. [8]
Отдельное рабочее место предусматривалось для командира комплекса. На пульте сигнализации и контроля отображалось состояние каналов наведения станции и установленных на стартовых позициях ракет. Расположение этого рабочего места в центре между рабочими местами операторов пятиканальных групп позволяло командиру наблюдать за работой всех операторов. [8]
При облучении объектов в зоне обзора приемные системы станции, каждая через свою антенну, воспринимают отраженные от цели сигналы. Усиленные и преобразованные отражённые сигналы, поступая на индикаторы целеуказания и в координатно-вычислительные устройства каналов цели, позволяли определять текущие координаты цели. Угловые координаты определялись по положению антенн в момент приёма отраженного от цели сигнала. Дальность до цели определялась по времени запаздывания отражённого от нее сигнала относительно момента излучения этого сигнала передатчиком. Применение узких диаграмм направленности антенн и малой длительности зондирующего импульса позволяло различать цели, если их координаты отличались примерно на 150 м по дальности и на 1,7° по углам. [1]
Координаты ракеты вырабатывались станцией аналогично с той только разницей, что приемные устройства станции вместо отраженных сигналов принимали сигналы ответчика, установленного на борту ракеты. Это было сделано потому, что размер ракеты был существенно меньше размера цели, и слабый отражённый от ракеты сигнал не позволил бы аппаратуре станции уверенно определять координаты ракеты. [1]
При объявлении тревоги комплекс переходил на автономное электропитание, для чего запускались дизели, вращающие электрогенераторы. После выхода генераторов на режим включалась аппаратура станции. Начинали вращаться азимутальная и угломестная антенны. Прогревались электронные лампы аппаратуры станции. Станция была готова к стрельбе через 13 минут после объявления тревоги.
Но это не гарантировало полностью исправного состояния по всей аппаратуре. Координатно-вычислительные блоки 20 каналов наведения имели большое количество электронных ламп – почти 10 тысяч. В связи с невысокой надёжностью аппаратуры, построенной на электронных лампах, часть блоков каналов наведения могла оказаться неисправной. В боевой обстановке неисправность блоков канала наведения привела бы к тому, что ракета, наводимая этим каналом, не поразила бы цель. Чтобы избежать такой ситуации, после каждого включения было предусмотрено проведение функционального контроля аппаратуры. Это позволяло исключить неисправные каналы наведения. Станция считалась боеготовой, если были исправны не менее 18 каналов наведения. Предпусковая проверка на функционирование с помощью штатной контрольно-измерительной аппаратуры увеличивала время приведения станции в боевую готовность до 25-30 минут.
В первом зале помещения станции располагалась высокочастотная часть оборудования и аппаратура системы передачи команд (СПК) для передачи управляющих команд на стартовавшие ракеты. Во втором зале находилось оборудование координатных блоков станции – 20 шкафов размером 2 х 2 х 0,5 метра каждый. Рабочие места операторов - шкафы целеуказания и наведения и пульт сигнализации и контроля находились в третьем зале помещения станции. В третьем зале также находился планшет, на котором отражалась воздушная обстановка. Данные о воздушной обстановке поступали по телефонной и громкоговорящей связи, а также с установленного там же индикатора «И-400», отображавшего информацию с радиолокационной станции А-100Б, которая находилась рядом с командным пунктом корпуса ПВО. На основании этих данных планшетист наносил на планшет сведения о воздушной обстановке.
Когда цель входила в зону обзора станции, её отметка появлялась на индикаторах наведения. Командир комплекса исходя из готовности стрельбовых каналов станции и наличия готовых к стрельбе ракет на стартовых позициях, определял, оператор какой из четырёх групп будет вести цель. После этого оператор наведения, получивший приказ, брал цель на автосопровождение. Для этого он выбирал стрельбовый канал нажатием соответствующей кнопки на пульте перед электронным экраном, и, действуя рукояткой с двумя степенями свободы – (прообраз современного джойстика), двигал метку следящей системы данного стрельбового канала (маркерный крест на электронном экране) и совмещал её с отметкой цели. Совместив маркерный крест с отметкой цели, оператор нажимал кнопку на рукоятке, и аппаратура соответствующего стрельбового канала начинала автоматически вырабатывать координаты цели. После этого отметка цели на электронном экране помечалась по-другому, а на правой половине шкафа наведения загоралась лампочка «Сопр.Ц.» напротив соответствующего канала.
Если была необходимость взять на автосопровождение ещё одну цель, то оператор наведение выбирал другой стрельбовый канал соответствующей кнопкой и повторял манипуляции рукояткой управления. Цели, сопровождаемые стрельбовыми каналами других групп, маркировались на индикаторах специальными метками. Как сказано в отчёте о Государственных испытаниях комплекса осенью 1954 года, время на захват целей оператором зависит от числа целей, одновременно находящихся в зоне обзора, их плотности, степени затемнения экранов индикатора целеуказания облаками от разрывов предыдущих ракет и составляет примерно 5-7 секунд на каждую цель. [7]
Автоматическое сопровождение (АС) не всегда надёжно и качественно. Так, при автосопровождении целей, представляющих собой плотные (неразрешимые и по углам, и по дальности) группы самолётов, системы слежения «мечутся» между составляющими такие цели элементами. Возникающие при этом большие ошибки в определении координат целей и их «разрывной» характер препятствуют точному наведению ракет. При наличии отражений от местных предметов возможны переходы следящих систем с целей на источники мешающих отражений. Для таких случаев была предусмотрена возможность сопровождения цели операторами (полуавтоматически). К каждой из четырёх групп стрельбовых каналов было придано по одному месту ручного сопровождения (РС). На их индикаторах район цели, также в координатах «дальность-азимут» и «дальность-угол места», отображался в крупном масштабе. Точному сопровождению цели соответствовало положение её сигналов в центрах обоих индикаторов. На каждом рабочем месте работало по три оператора. Один сопровождал цель по дальности, два других – по угловым координатам. Операторы азимута и угла места использовали соответствующие индикаторы. Операторы дальности – любой из индикаторов по своему выбору Наблюдая цели «в плане» (на индикаторе «дальность – азимут») и сбоку (на индикаторе «дальность – угол места»), операторы могли сопровождать плотные группы самолётов с приемлемой точностью даже на фоне отдельных мешающих отражений. [8]
В случае, если было невозможно автоматическое сопровождение цели, оператор наведения переключал необходимый стрельбовый канал с режима «АС» в режим «РС» специальным переключателем на пульте перед экраном. В этом случае координаты цели задавались аппаратурой РС. Задачей операторов РС было удерживать отметку цели в центре индикаторов, вращая штурвалы на шкафах ручного сопровождения.
Успешное поражение цели возможно, если цель находится в зоне поражения. Зона поражения представляет собой пространство, в котором происходит встреча ракеты с целью. Зона поражения определяется:
- размерами зоны устойчивого сопровождения цели;
- параметрами полёта целей;
- средней скоростью ракеты и временем её вывода на траекторию, обусловленную методом наведения;
- точностью наведения ракеты на цель, достаточной для поражения цели. [7]
Ближняя граница зоны поражения составляла 8-11 км, дальняя граница зоны поражения определялась точностью наведения ракет на цель, при которой достигается поражение целей, и находилась на наклонной дальности до 35 км, а после нескольких модернизаций была увеличена до 59 км. Нижняя и верхняя границы зоны поражения находились на высотах 3-5 км и 22-25 км соответственно, а после модернизаций составили 0,5 км и 35 км.
Ошибка в определении момента пуска ракеты могла привести к тому, что цель не будет поражена, и вызовет бесполезный расход ракет. Кроме того, вероятность поражения целей в зоне поражения не одинакова и уменьшается с увеличением дальности стрельбы. Это вызывало необходимость более точного определения момента пуска ракет. Поэтому для более полного использования боевых возможностей комплекса был создан специальный прибор, облегчающий оператору работу по определению момента пуска ракет. Этот прибор в зависимости от параметров цели (высота, скорость, курс) рассчитывал зону пуска и проецировал её на электронный экран шкафа наведения. Если отметка цели не вошла в зону пуска, то пущенная в этот момент ракета не смогла бы поразить цель. Поэтому стрелять можно было только в тот момент, когда отметка цели оказалась в зоне пуска.
Убедившись в соблюдении всех условий для успешного поражения цели, оператор пуска на правой части шкафа наведения откидывал крышку, закрывающую кнопку «Пуск» необходимого стрельбового канала, и нажимал кнопку «Пуск». Этот сигнал поступал на пульт ЧП, расположенный в бункере на стартовой позиции и обслуживающий стартовые площадки именно этого стрельбового канала. В соответствии с положением переключателя «ПОСЛЕДОВАТЕЛЬНОСТЬ ПУСКА ИЗДЕЛИЙ» необходимый блок «А» управления подготовкой и стартом ракеты на пульте ЧП начинал выполнение циклограммы старта ракеты. На блоке «А» начинала мигать лампа «СТАРТ» и начинает выполняться циклограмма старта ракеты.
Сначала подавался электрический импульс на подрыв пиропатронов клапана подачи воздуха. Сжатый воздух хранился в шаровом баллоне под давлением 350 атмосфер и в процессе полёта ракеты использовался для приведения в действие рулей и элеронов. После срабатывания клапана сжатый воздух из шарового баллона поступал в редуктор, где его давление снижалось до необходимой величины, после чего воздух подавался в воздушную систему ракеты. Оттуда воздух поступал в ампульную батарею и приводил её в действие.
Ампульная батарея представляла собой химический источник тока, приводящийся в действие посредством выдавливания сжатым воздухом электролита из эластичных ампул в полость расположения электродов, время выхода на режим не более 2 секунд. Батарея выдавала напряжение 26 вольт, разрядный ток 45 ампер в течение 120 сек. От энергии, которую вырабатывала ампульная батарея, работал преобразователь тока, который представлял собой мотор-генератор, вырабатывающий трёхфазный переменный ток напряжения 115 В частотой 400 герц. После того, как преобразователь тока выйдет на нормальный режим работы, питание электрооборудования ракеты переключалось на него, а на блоке «А» пульта ЧП в бункере на стартовой позиции загоралась сигнальная лампа «ПИТАНИЕ С БОРТА».
На автопилот ракеты подавалась команда «Разарретировано». По этой команде гироскопы автопилота освобождались из фиксаторов. При разарретировании в свободном гироскопе замыкались контакты, через которые на стартовый пульт подавался сигнал «Разарретировано».
Сигнализаторы давления воздушной системы автопилота срабатывали с задержкой и замыкали контакты в цепи готовности на подрыв пиропатрона пусковой камеры. Пусковые клапаны О и Г срабатывали и открывали доступ компонентам топлива в полости двигателя. При соприкосновении в камере сгорания окислитель и горючее воспламенялись. При этом на блоке «А» пульта ЧП загоралась сигнальная лампа «ЗАПУСК ДВИГАТЕЛЯ».
После того, как тяга двигателя достигнет необходимой величины, газовый поток двигателя окажет давление на флажок стопорного механизма пускового стола, достаточное, чтобы срезать две чеки и повернуть флажок. Это движение через тяги передаётся осям с кулачками, которые разводят щёки, удерживающие ракету за стартовые болты. При подъёме ракеты отрывной штекер отсоединялся от бортового щитка ракеты за счёт натяжения специальных тросиков, удар кабеля с отрывным штекером по клеммной коробке смягчал специальный амортизатор с резиновым покрытием. Сигнализация на блоке «А» пульта ЧП гасла, гасла и сигнальная лампа, показывающая состояние этой стартовой площадки на пульте командира комплекса в помещении станции.
При старте ракеты снималась первая ступень предохранения предохранительно-исполнительного механизма. Предохранительно-исполнительный механизм (ПИМ) выполнял следующие функции [11]:
- предохранял боевую часть, установленную в ракету, от подрыва при служебном обращении с ракетой, при её старте и на траектории полёта до момента взведения ПИМа;
- по электрическому сигналу радиовзрывателя выдавал детонационный импульс на подрыв боевой части;
- на 70-й секунде полёта выдавал детонационный импульс на самоликвидацию ракеты.
После старта движение ракеты по траектории задавалось её системой управления. Система управления – это совокупность устройств, позволяющих ракете совершать полёт по необходимой траектории. Общая система управления включала в себя систему управления воздушными рулями, систему управления газовыми рулями и систему управления элеронами. Органы управления (горизонтальные газовые рули, элероны, воздушные рули курса и тангажа) работали от сжатого воздуха. Все команды по управлению и стабилизации ракеты поступали в систему от автопилота. [5]
Автопилот являлся одним из основных звеньев бортовой аппаратуры и был предназначен для стабилизации ракеты и управления ею в полёте. Автопилот осуществлял:
- стабилизацию ракеты относительно её центра масс по курсу, тангажу и крену в процессе движения по траектории;
- управление траекторией полёта ракеты в соответствии с заданной программой при автономном полёте и в соответствии с командами радиоуправления при управляемом полёте;
- переход с автономного управления ракетой на управление от радиокоманд, при этом происходит подключение бортовой аппаратуры радиоуправления к автопилоту. [9]
Процесс наведения ракеты на цель разделялся на два этапа: этап вывода и этап наведения. Первый этап полёта ракета совершала автономно по общей программе для всех случаев полета цели. При этом в первые 5 секунд полёта происходило склонение ракеты в вертикальной плоскости в сторону зоны обзора станции, а по курсу полет происходил в направлении биссектрисы зоны обзора станции Б-200. На этом этапе полёта управление ракетой осуществлялось автопилотом посредством газовых рулей, расположенных за срезом сопла двигателя и при работе двигателя находящихся в струе газов, истекающих из него. Так осуществлялось программное управление ракетой на автономном участке полёта. [9]
Метки следящих систем ракеты устанавливались на экранах индикаторов операторов наведения так, чтобы отметки стартовавшей ракеты прошли через метки следящих систем. В момент совпадения отметок ракеты с метками следящих систем, когда ракета попадала в зону захвата станцией наведения, координатные блоки станции начинали автоматически сопровождать ракету и выдавать ее текущие координаты. При этом на правой половине шкафа наведения загоралась лампочка «Сопр.Р.» напротив соответствующего канала.
После захвата ракеты на автосопровождение начинался второй этап – этап наведения. При сопровождении цели (ракеты) с выхода координатных блоков непрерывно поступали последовательности импульсов, временной сдвиг которых относительно фиксированного начального положении импульсов опорных напряжений определял значение координат цели (ракеты) по углам и дальности. С координатных блоков импульсы, определяющие координаты цели и ракеты, поступали в блок выработки команд, в котором вырабатывались команды управления ракетой на траектории.
Сигналы, пропорциональные выработанным командам управления ракетой в наклонной и вертикальной плоскостях, кодировались и через станции передачи команд автоматически передавались на борт ракеты по радиолинии. Радиокоманды управления, принятые на ракете, расшифровывались и передались на автопилот, который, в соответствии с командами, отклонял рули направления и высоты, направляя ракету на цель. Антенны системы передачи команд на ракеты были ненаправленными и излучали сигналы в весь сектор обзора станции. Для того, чтобы радиокоманды управления попадали только на нужную ракету, они передавались на разных частотах для разных стрельбовых каналов. Привязка ракеты к частоте конкретного стрельбового канала осуществлялась установкой на ней гетеродина - специального сменного радиоблока размером примерно с сигаретную пачку. Существовало три частотных диапазона (литеры А, Б и В), в которых передавались радиокоманды управления на ракеты. Для предотвращения влияния на ракету радиокоманд управления от «чужих» станций наведения системы передачи команд и радиовизирования ракет соседних полков работали в разных частотных диапазонах.
После набора ракетой скорости при наличии заданного скоростного напора воздуха происходило снятие второй ступени предохранения и взведение предохранительно-исполнительного механизма (ПИМа) по огневым цепям. В конце этапа наведения при сближении ракеты с целью на расстояние 700 – 800 метров блок выработки команд станции Б-200 выдавал дополнительную разовую команду на взведение радиовзрывателя ракеты. Радиовзрыватель представлял из себя автономное малогабаритное радиолокационное устройство, работающее в сантиметровом диапазоне длин волн. Принцип действия радиовзрывателя основан на использовании импульсного метода активной радиолокации. Через передающую антенну в окружающее пространство излучалась высокочастотная энергия в виде коротких импульсов. Если цель попадала в диаграмму направленности антенной системы, то на вход приёмного устройства радиовзрывателя поступали отражённые от цели сигналы, величина которых зависела от расстояния до цели, её размеров и положения относительно ракеты. Радиовзрыватель срабатывал, то есть выдавал импульс на предохранительно-исполнительный механизм для подрыва боевой части (БЧ) ракеты, когда на его вход поступит определённое количество импульсов, отражённых от цели. [10]
Боевая часть ракеты состояла из корпуса, имеющего камеру, дно и крышку, и разрывного заряда. Камера представляла собой оболочку, изготовленную из стальных поражающих элементов, армированных пластмассой. Оболочка имела бочкообразную форму. Масса одного поражающего элемента 3-5 грамм, всего поражающих элементов более 15 000 штук. Разрывной заряд представлял собой монолитную взрывчатую смесь тротила и гексогена в соотношении 20 : 80 (ТГ-20). Воздушная цель поражалась осколочными элементами, а на близких расстояниях – суммарным действием осколочных элементов и ударной волны взрыва. Радиус поражения осколочной БЧ составлял примерно 60 метров. [5]
В случае, если через 70 секунд с момента старта ракеты не поступал электрический сигнал от радиовзрывателя, то есть цель не попадала в зону действия радиовзрывателя, срабатывал ПИМ. От детонационного импульса ПИМа подрывался заряд боевой части и происходила самоликвидация ракеты..
Комплекс С-25 обеспечивал стрельбу по одной цели несколькими (до четырёх) ракетами. При этом для исключения влияния разрывов предыдущих ракет на точность наведения последующих ракет пуски целесообразно проводить с интервалом 7-10 секунд. Стрельба несколькими ракетами по одной цели существенно увеличивала вероятность поражения. При стрельбе одной ракетой вероятность поражения цели составляла 0,7-0,9 в зависимости от параметров движения цели и условий стрельбы. При стрельбе тремя ракетами вероятность поражения цели увеличивалась до 0,99.
1. Отчёт о государственных испытаниях комплекса Б-200, В-300 системы 25. 1955 год
2. «Подъёмно-пусковое устройство стартовой площадки СМ-102А и СМ-82» Военное издательство Министерства обороны СССР, Москва-1957.
3. «Автополуприцеп ПР-7МДП. Техническое описание и инструкция по эксплуатации». Военное издательство Министерства обороны СССР, Москва-1973.
4. Альбом «Зенитный стационарный ракетный комплекс С-25»
5. «Ракета 217М. Техническое описание. Книга 1. Устройство ракеты. Общие сведения». Военное издательство Министерства обороны СССР, Москва-1981.
6. «Ракета 217М. Инструкция по эксплуатации. Книга 4. Содержание ракеты на стартовой позиции». Военное издательство Министерства обороны СССР, Москва-1963.
7. «Отчёт о результатах государственных испытаний комплекса Б-200, В-300 системы 25» книга 2, 1955.
8. Альперович К.С. «Годы работы над системой ПВО Москвы – 1950-1955 (Записки инженера)». – М., 2003
9. «Ракета 5Я24. Техническое описание. Часть 2. Автопилот 5А15М». Военное издательство. Москва-1986.
10. «Ракета 5Я24. Техническое описание. Книга 4. Радиовзрыватель 82В6». Военное издательство. Москва-1986.
11. «Ракета 5Я24. Техническое описание. Часть 1. Общие сведения. Устройство ракеты». Военное издательство. Москва-1985.
Последнее редактирование 17.11.2012
Огневой комплекс С-25 на позиции. Рисунок из альбома «Зенитный стационарный ракетный комплекс С-25»:
Транспортировка ракеты В-300. Фото из «Альбома иллюстраций изделия 5Я25, 1967»:

Ракета 217М на стартовом столе. Фото из альбома «Зенитный стационарный ракетный комплекс С-25»:
Пульт «ЧП» в бункере управления стартовой позиции. Фото из альбома «Система – 25 противовоздушной обороны г.Москвы»:
Вертикальная антенна станции «Б-200» - предназначена для обзора воздушного пространства в угломестной плоскости. Фото из альбома «Система – 25 противовоздушной обороны г.Москвы»:
Зал управления комплексом С-25. В центре – пульт старшего оператора, по бокам – рабочие места операторов наведения и пуска, на заднем плане – планшеты воздушной обстановки. Фото из «Альбома иллюстраций изделия 5Я25, 1967»:

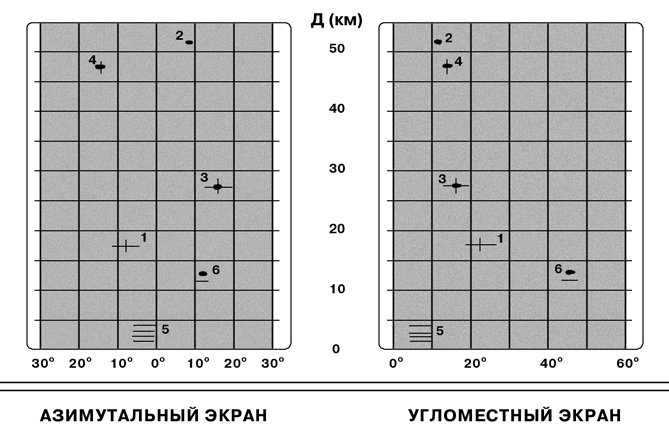
Экраны индикаторов рабочего места операторов наведения и пуска:
1 – управляемая оператором метка захвата цели;
2 – отметка цели;
3 – цель, сопровождаемая каналом данной группы;
4 – цель, сопровождаемая каналом другой группы;
5 – ждущие стробы захвата ракеты;
6 – отметки ракеты и сопровождающих её стробов.
Рисунок из книги К.С.Альперовича «Годы работы над системой ПВО Москвы – 1950-1955 (Записки инженера)». – М., 2003:
Мишень на базе ракеты 5Я24 в полёте. Фото Георгия Данилова, www.vko.ru:

Предыдущая глава Следующая глава Оглавление